![[오늘의 운세] 6월 28일](https://pds.joongang.co.kr/news/component/htmlphoto_mmdata/202406/28/9866f29c-fc4e-4fd9-ad4a-3d0a95d53514.jpg.thumb.jpg/_ir_432x244_/aa.jpg)


!["형, 이럴려고 5선 했어?"…86 푸시에도 불출마 기운 이인영, 왜 [who&why]](https://pds.joongang.co.kr/news/component/htmlphoto_mmdata/202406/28/6a0e5eaf-34f9-4b83-8805-da9884f9957c.jpg.thumb.jpg/_ir_432x244_/aa.jpg)

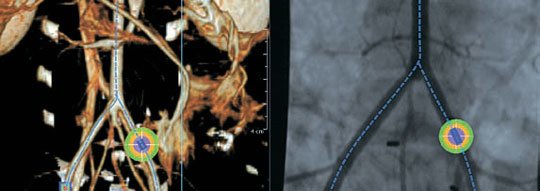
혈관 속을 움직이고 있는 로봇(원 안)의 위치와 혈관이 X선 영상(오른쪽)에 나타난다. 점선은 로봇의 이동 경로다. 왼쪽 그림은 장기 속에서의 로봇의 위치를 표시한 것이다.

손가락 위에 올려놓은 로봇.
연구 결과는 미국 전기전자공학회(IEEE) 산하 국제로봇공학 및 자동화학회(ICRA)의 초청을 받은 박 교수가 지난 3일 미국 앵커리지에서 열린 ‘마이크로로봇 전문가 특별 워크숍’에서 발표했다. 세계 로봇 과학자들은 인체 혈관 속에서 작동하는 로봇 개발을 줄곧 시도해 왔으나 혈류 속도가 최고 초속 0~666㎜ 사이를 불규칙하게 오가고 맥박이 주기적으로 뛰어 성공하지 못했다.
혈관 로봇은 관상동맥과 대정맥·대동맥 등 굵은 혈관 속을 움직여 원하는 위치로 이동하면서 막힌 혈관을 뚫을 수 있다. 로봇이 분당 1200~1800회 회전해 드릴처럼 혈전에 구멍을 내 피를 통하게 한다. 로봇을 움직이는 동력은 외부 자기장이다. 혈관 내 이동 경로는 X선으로 혈관 내부의 로봇을 보면서 외부에서 조종할 수도 있고, 프로그램에 따라 자동으로 할 수도 있다.
혈관 로봇 개발 과정에서 동물 임상실험을 맡은 전남대 의과대 정명호 교수는 “현재의 로봇에 초음파·절개 기능 등을 추가하면 초소형 혈관 로봇의 새 장을 열 수 있을 것”이라고 기대했다. 연구 결과와 관련된 특허는 22건 출원했다. 관련 논문도 20편 발표했다. 연구팀은 이번 성과를 바탕으로 2014년까지 지름 1㎜, 길이 10㎜ 크기의 로봇 내부에 약물 주입과 혈전 뚫기, 조직 자르기 기능을 보탤 계획이다.
박방주 과학전문기자





